


















We’ve talked about autonomous vehicles before. However, Tesla owner Pat Larson decided to go one step further. He has built an automatic charger in his garage, which plugs his vehicle in for charging autonomously.
Owner Built His Own Automatic Charger for Tesla
This is actually something that a number of companies are trying to do. Both Tesla and Volkswagen have talked about the potential of automatic charging robots. Electrify America also plans on eliminating the need for human intervention from the charging process. In fact, Tesla has designed a robotic snake prototype for automatic charging as well.
This is something we haven’t seen at fuel stations either. You either have to fill up your vehicle yourself or an employee who does it for you. But what Pat did isn’t for a public charging station – it is for his home charger.
The Hardware Components
Pat has used a Raspberry Pi 4 microprocessor, around which the entire system revolves. The setup mainly consists of a carriage mounted on two linear bearings which help with the linear movement of the setup along the length of the vehicle. There is also a linear actuator that helps with the movement of the charger towards and away from the vehicle. There is a servo motor attached near the charger mount. This aids in rotating the charger outwards at the correct angle.
For sensing, Pat used an ultrasonic distance sensor. This ensures that the entire setup is sufficiently close to the vehicle’s charging port. It also makes sure that there is no collision of any kind between the vehicle and the charging equipment. Furthermore, a camera takes pictures and sends them to the microprocessor. Pat has set up a machine learning model using TensorFlow in the microprocessor, which helps in locating the charging port perfectly.
Finally, a flashlight helps locate the charging port properly, especially in dark conditions. This works with a Zigbee protocol and is paired with the Raspberry Pi microprocessor. Motor controllers and a small Arduino board help with the motor control for the locomotion of the carriage.
Software Loop
The code begins with the ultrasonic sensor detecting whether or not the vehicle is in the garage. The camera then springs into action, taking pictures and locating the reflector on the charging port. One drawback is that the system does not have any hardware for opening the charging port. Pat solved this issue by communicating with the Tesla app through the internet to send the command for opening the port.
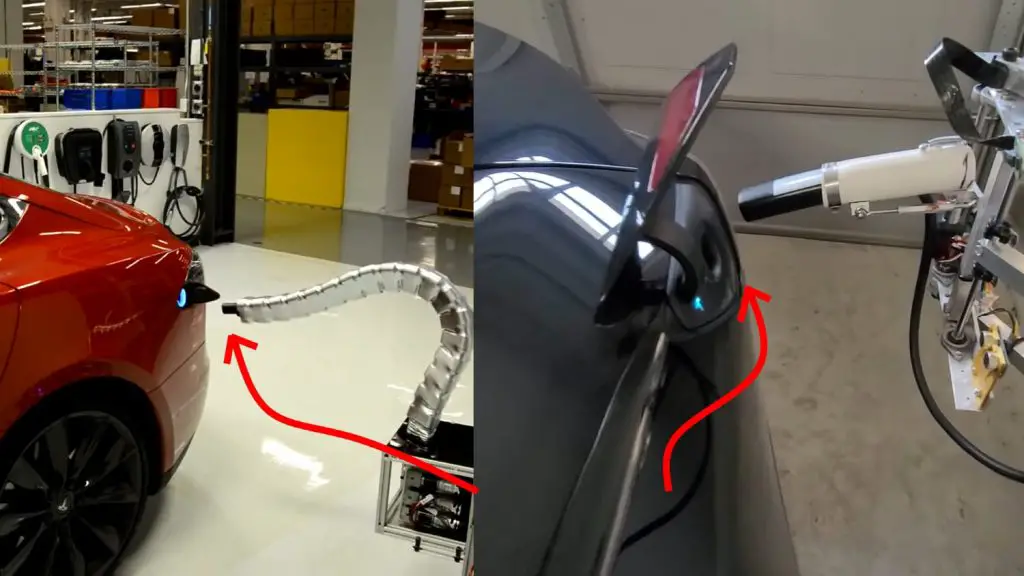
Once the charging port is open, the camera sets about locating the blue glowing Tesla logo. The reason for this is that the actual charging port is a little hard to locate for a vision-based system, especially because it looks different from different angles. The glowing logo is easier to locate, and it is just beside the port.
The small issue with the final part is that it is an open-loop system. It does not take feedback from the charger mount’s real-time position. Hence, the system takes a little extra time to perfectly locate the port. There is also a spring at the base of the charger mount, which helps in achieving a pitching movement for getting the accurate orientation of the charger.
Our Opinion
This kind of system could be very useful for handicapped people, or someone without the physical ability to plug in their vehicle for charging. All they need to do is park their vehicle in the garage and activate the automatic charging system. The rest will be taken care of.
One of the challenges of this system is that the actuation is quite slow. However, it is a compact setup and works as designed.